왼손 좌표계와 오른손 좌표계의 큰 차이점은 Z축의 진행방향이다. 왼손 좌표계에서 +z의 방향은 화면 안쪽으로 향하며, 오른손 좌표계는 화면 바깥쪽으로 향한다. 이러한 차이로 각각의 좌표계에서 구성하는 행렬은 서로 전치된다. 대표적으로 왼손 좌표계는 Direct3D에서 사용하고, 오른손 좌표계는 3Ds Max, OpenGL에서 사용된다.
각각 좌표계의 회전 방향
왼손 좌표계에서 회전 방향은 각 축에 대해 시계방향으로 회전한다. 왼손의 검지로 축의 방향을 가르키고, 엄지를 폈을때, 엄지가 향하는 방향으로 회전을 한다. 마찬가지로 오른손 좌표계에서 회전 방향은 각 축에 대해 반시계방향으로 회전한다. 왼손과 마찬가지로 오른손의 검지로 축의 방향을 가르키고, 엄지를 폈을때, 엄지가 향하는 방향으로 회전을 하게된다.
두 점 사이의직선에가까운 근사를 형성하기 위해 선택해야 하는 n차원 래스터의 점을 결정하는 알고리즘입니다.비트 맵 이미지(예 :컴퓨터 화면)에서선 프리미티브를 그릴 때 주로 사용되며, 정수 추가, 빼기 및비트 쉬프트만 사용하므로 표준컴퓨터 아키텍처에서 매우 저렴한 작업입니다.증분 오류 알고리즘입니다.컴퓨터 그래픽분야에서 개발된 최초의 알고리즘 중 하나입니다.원 알고리즘을 확장하면원그리기에 사용될 수 있습니다.
Wu의알고리즘과 같은알고리즘은안티 앨리어싱을 지원할 수 있기 때문에 최신 컴퓨터 그래픽에서 자주 사용되지만 Bresenham의 회선 알고리즘의 속도와 단순성은 여전히 중요하다는 것을 의미합니다.알고리즘은플로터및 최신그래픽 카드의 그래픽 칩과 같은 하드웨어에서 사용됩니다.또한 많은소프트웨어그래픽 라이브러리에서 찾을 수 있습니다.이 알고리즘은 매우 간단하기 때문에 현대 그래픽 카드의펌웨어또는그래픽 하드웨어에서 구현되는 경우가 많습니다.
"Bresenham"이라는 레이블은 오늘날 Bresenham의 원래 알고리즘을 확장하거나 수정하는 알고리즘 계열에 사용됩니다.
브레젠험 알고리즘의 원리
실수 연산이 필요 없고 정수 연산만으로 처리되는 속도가 매우 빠른 래스터 방식 컴퓨터 그래픽에서 선을 긋는 알고리즘으로, 가로나 세로의 어느 한쪽 좌표를 시작점으로 하여 종료점까지 1씩 가산하여 좌표를 증가시킬 것 인가 또는 그대로 유지할 것인가를 판단합니다.
1. 기울기가 0과 1 사이인 직선을 가정해줍니다.
직선의 방정식과 평면상에 존재하는 임의의 점 P
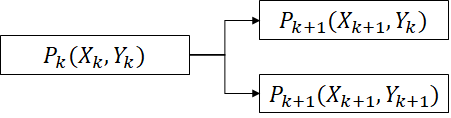
2. 현재 좌표에서 다음 찍어야 할 좌표값을 구해야 되는데 x는 항상 1만큼 증가하고, y는 Yk, Yk+1 둘 중 하나를 선택합니다. y좌표 선택 판단기준은 중단점 M으로 판별합니다.
3. 중단점 M을 통해 직선보다 위에 존재하면 아래쪽의 칸을 선택하고, 직선보다 아래에 존재하면 위쪽의 칸을 선택합니다.
중단점이 직선보다 위에 위치할 경우중단점이 직선보다 아래에 위치할 경우
4. 즉, 중단점 M이 직선의 위에 있냐 아래에 있냐로 다음 점의 위치를 판단한다는 것인데, 그 판별식은 다음과 같은 방법으로 구합니다.
① 그리는 선분의 양 끝점을 입력받습니다. Pa(Xa, Ya), Pb(Xb, Yb)
② 두 점을 이용해서 W값과 H값을 구합니다.
③ 직선의 방정식의 기울기에 대입합니다.
④ 두 점을 이용하여 직선의 방정식을 구합니다.
⑤ 식을 한편으로 정리를 합니다.
5. 도출된 식으로 중단점을 대입하고, 값의 크기를 0과 비교합니다.
이때, 중단점 M은 다음과 같습니다.
이 값을 위의 식에 대입합니다.
이 값을 판별하여, 0보다 크면, 중단점이 직선보다 위에 있으므로, 다음 점의 위치는 다음과 같습니다.
렌더 파이프 라인에서 Vertex Shader 단계의 마지막에, 지정된 좌표를 받아들이고 이 범위에서 벗어난 모든 좌표는 자르게됩니다. 이때, Clip 된 좌표들은 모두 폐기되고, 남은 좌표들은 최종적으로 파편화되어 화면에 보이게 됩니다. 이때, 눈에 보이는 모든 좌표들이 -1.0과 1.0 범위 안에 지정하는 것은 직관적이지 않기 때문에, 우리가 원하는 화면에 표현하기 위한 공간으로 다시 변환하게 됩니다. 이때 사용되는 것이 NDC(Noramlize Device Coordinate)이며, 이 공간은 투영(Projection) 행렬에 정의됩니다.
앞서 유도한 투영 행렬이 정의하는 Viewing Box는 절두체(Frustrum)라고 불립니다. 이 절두체 내부에 있는 좌표들은 화면에 나타나게 됩니다. 지정한 범위 내에서 NDC로 변환하는 전체적인 과정을 '투영한다'라고 합니다. 3D좌표를 2D에 매핑하기 쉬운 NDC로 투영하기 때문입니다.
정규좌표(Normalized Device Coodinate)
정규 좌표(NDC)는 1을 기준으로 하는 2차원 좌표입니다. 이 좌표계의 원점은 화면(Device)의 정 중앙에 위치하며, 화면의 우상단 좌표가 (1.0, 1.0), 좌하단 좌표가(-1.0, -1.0)이 됩니다.
정규 좌표를 사용하면 해상도에 따른 화면좌표 계산이 단순화됩니다. x좌표를 계산할 때 계산하는 과정을 줄일 수 있으며, 해상도를 제외한 값을 계산해 두면 해상도가 변할 경우에도 쉽게 실제 화면 좌표를 계산할 수 있게 됩니다.
3D 공간을 나타내는 화면상의 어느 한 점을 표현하기 위해서는 물체의 Local 좌표를 카메라를 기준으로 하는 화면 좌표로 변환해야 하는 과정이 필요합니다. 이러한 작업을 '투영(Projection)'이라고 합니다. 즉, 투영을 하기 위해서 우리가 사용하는 좌표를 변환하는 과정이 필요하다는 의미입니다.
처음으로 물체는 로컬 공간(Local Space)에 정의 되어있다. 로컬 공간에 정의된 물체는 월드 변환을 통해서 월드 공간(World Space)로 이동합니다. 이 월드 공간에 렌더링할 대상의 물체들과 카메라, 광원 등이 배치됩니다. 다음으로는 카메라 행렬에 의해서 뷰 공간(View Space)로 변환됩니다. 이 변환을 통해서 카메라를 기준으로 하여 새로운 좌표체계가 완성되게 됩니다.
이제 이 카메라를 통해서 화면 공간(Screen Space)에 물체를 표현해야 하기 때문에 3차원 공간(화면 공간)을 2차원 공간(화면 공간)으로 변환해야하는 과정이 필요합니다. 이 과정을 투영 변환이라고 합니다.
카메라 좌표계의 XZ 평면과 투영을 할 경우 생기는 화면 공간
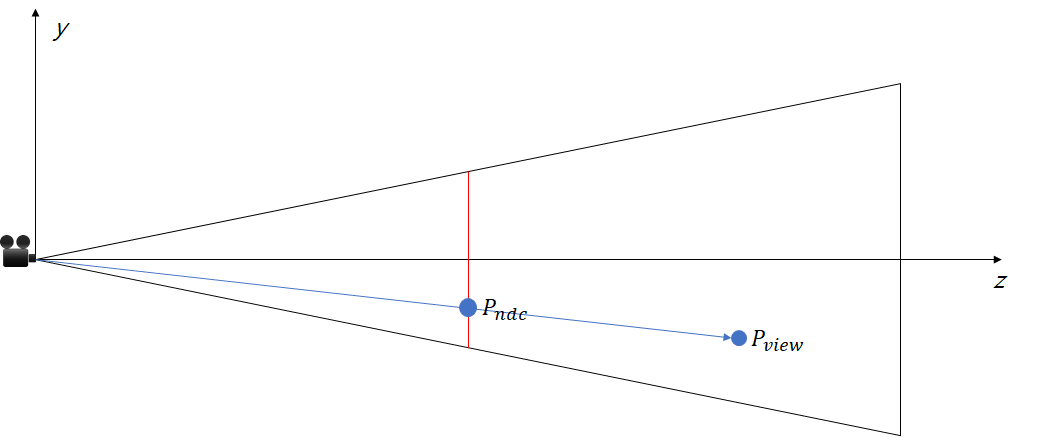
왼쪽의 그림은 카메라 좌표계의 XZ 평면을 나타내며, 이 상태에서 투영변환 된 것이 오른쪽의 XZ 평면이다. 왼쪽 그림의 원점에 카메라가 존재하고, 카메라가 비출수 있는 공간이 빨간 선이 둘러진 부분입니다. 카메라의 표현이 가능한 공간은 유한하며, 왼쪽 그림의 두 평면 (Near, Far)의 공간 사이의 물체만 화면에 나타나게 됩니다. 왼쪽 그림의 빨간색 부분이 화면을 표현하는 공간인 절두체(Frustrum) 영역입니다. 투영 변환은 이 절두체 영역을 오른쪽 그림과 같은 공간으로 변환하는 것을 의미합니다.
카메라 영역의 구성 성분
먼저 투영행렬을 유도하기 위해서는 카메라 좌표계를 구성하는 각 성분에 대해서 이해가 필요합니다. 카메라가 표현하는 공간까지의 거리인 d의 값을 알아야 합니다. 이 값을 구하기 위해서, 카메라의 시야각(FOV)을 이용합니다. 삼각함수를 이용하여 tan의 값을 구할 수 있는데, 그 값은 다음과 같습니다.
이 식을 d로 정리를 하면, d는 다음과 같습니다.
이제 다시, 처음의 그림으로 돌아가서, 공간상의 점을 화면에 표현을 할수 있도록 해봅니다.
절두체 내부의 모든 점들은 투영 평면((1, d) ~ (-1, d)) 위에 표현됩니다. 두 점과, 삼각형의 닮은꼴을 이용하여 투영 평면 위에 표현되는 모든 점들을 찾아낼 수 있습니다. 즉 투영 평면 상의 점 P의 y 성분의 값은 다음 비를 만족합니다. 또한, 오른손 좌표계에 의해서 Pview의 Z값은 -Zview값이 됩니다.
이 비율을 이용하여 Yndc값은 다음과 같이 나타나게 됩니다.
똑같은 방법으로 XZ 평면상의 점또한, 다음 비를 만족할 것입니다.
이 비율을 이용하여 Xndc의 값은 다음과 같이 나타나게 됩니다.
그러나, 이경우는 투영평면이 정사각형으로 표현되는 경우 나타나게 되는 경우이며, 일반적인 화면의 비는 가로가 더 넓기 때문에, 종횡비 a의 역수를 Xndc의 성분에 곱해주게 되면 투영 평면 위의 점을 구할 수 있습니다.
최종적인 투영변환 공식은 다음과 같습니다.
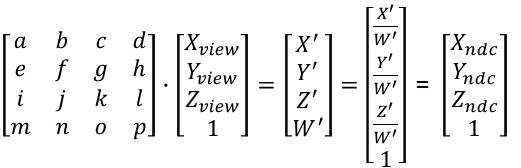
이제, 뷰 공간의 점을 화면 공간의 점으로 선형 변환하는 행렬이 있다고 가정합니다.
.
그러나 Xndc와 Yndc의 값은 구했으므로, 위의 행렬은 다음과 같이 표현이 가능합니다.
여기에서, W'의 값이 Zview의 값과 같다고 가정하게 되면, 점의 정의가 동차 좌표계의 정의와 일치하게 되며, Zview값을 모두 바꿀 수 있게 됩니다. 즉 행렬식을 변경하면 다음과 같게 됩니다.
이제 마지막으로 k와 l의 값을 구하는 일이 남았습니다. 두개의 미지수는 근평면(Near Plane)의 거리와 원평면(Far Plane)의 거리를 이용하여 다음과 같은 행렬식을 유도할 수 있습니다.
씬의 최종 단계에 보이지 않는 불필요한 폴리곤을 잘라내어 렌더링을 하지 않는 기법. 컬링의 종류는 백페이스 컬링(BackFace Culling), 오클루전 컬링(Occlusion Culling), 프러스텀 컬링(ViewFrustum Culling)이 있다.
컬링의 종류
-백페이스 컬링(Backface Culling)이란?
카메라에서 보이지 않는 뒷면의 폴리곤을 제거하는 기법. 백페이스 컬링은 폴리곤은 두 개의 면을 가지고 있으며 하나의 면을 전면, 다른 면을 후면이라 부르고 전면을 향하고 있는 폴리곤들이 뒤쪽의 후면 폴리곤을 가리고 있을때 후면 폴리곤을 그리지 않음으로써 최적화적 이득을 취하는 컬링 기법이다.
오클루젼 컬링(시야에 보이지 않는 오브젝트는 그리지 않는 컬링 기법)과도 비슷하다고 볼 수 있다.